Żeby odpowiedzieć na pytanie co to jest pochodna wektora wodzącego po drodze, trzeba się zastanowić jak mierzymy długość krzywej.
Weźmy krzywą w
R3 w postaci parametrycznej.

Naszą krzywą przybliżamy łamaną.

Następnie każdy wektor odpowiadający odcinkowi przenosimy do przestrzeni stycznej w danym punkcie przez zwykły izomorfizm pomiędzy standartowymi bazami.

Ta przestrzeń styczna to zwykły
R3, więc możemy w niej liczyć długość naszego kawałka łamanej.

Sumujemy wszystkie uzyskane długości i przechodzimy do granicy. Czyli w skrócie policzyliśmy całkę.

Jeśli s(t) nie ma kawałków stałych, to jest bijekcją, i istnieje funkcja odwrotna s
-1:

W takim razie możemy sparametryzować naszą krzywą parametrem s, i już trywialnie liczyć pochodną po s ze wzoru na pochodną złożenia funkcji:

Jeśli ma się ochotę, konstrukcję s(t) przez łamaną można zapisać trochę inaczej, korzystając z geometrii różniczkowej. Pochodna funkcji w danym punkcie jest odwzorowaniem liniowym przybliżającym ją w tym punkcie.

Czyli w danym punkcie
r(t
0) mamy odwzorowanie liniowe
R3 →
R3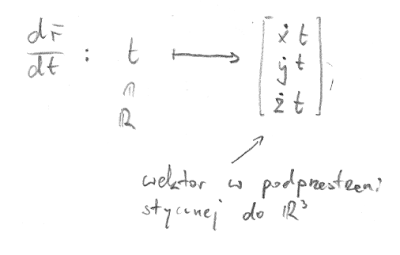
Jest to macierz 1x3. Można myśleć o tym jako o wektorze w przestrzeni stycznej do
R3 w punkcie należącym do krzywej — wystarczy podziałać tym odwzorowaniem na liczbę 1, i już mamy odpowiadający wektor.

Możemy zdefiniować w każdym punkcie krzywej wielkość:

Będzie ona miała interpretację prędkości. I już stąd można otrzymać przez całkowanie funkcję o którą nam chodzi:

Jest to konstrukcja trochę mniej ogólna, bo nie włożyłem tu możliwości określenia tensora metrycznego zależnego od punktu w przestrzeni, ale generalnie znaczy to samo, tyle że innymi słowami.
Dzięki temu, że mamy zdefiniowane s(t), możemy już powiedzieć co to jest pochodna wektora wodzącego po drodze, czyli coś co fizycy nazywają wektorem stycznym do toru:

 więc
więc Okazuje się że prawdziwy jest związek:
Okazuje się że prawdziwy jest związek:

 Raz wychodzi coś z arsinh, a raz z log. Niestety nie potrafię sobie przypomnieć tego drugiego sposobu. No i jeszcze przydałoby się wyprowadzić analogiczny wzór dla arcosh.
Raz wychodzi coś z arsinh, a raz z log. Niestety nie potrafię sobie przypomnieć tego drugiego sposobu. No i jeszcze przydałoby się wyprowadzić analogiczny wzór dla arcosh.
 a wielozbiorami liczb pierwszych.
a wielozbiorami liczb pierwszych. , w którym by miały.
, w którym by miały.





































